UG10.0怎么做两垂直方向位移运动仿真动画?
UG10.0怎么做两垂直方向位移运动仿真动画?
1、首先建立简单模型。在这里画了一个大基座,一个方块,和一条直线。此直线将作为啮合连杆(装配过程不需要任何约束) 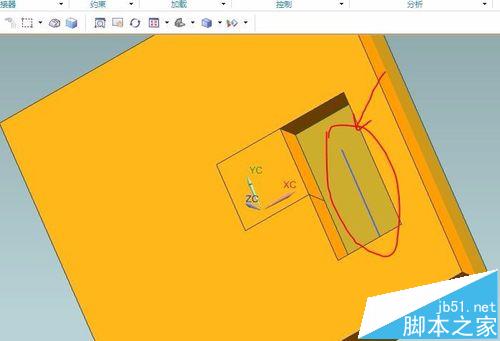
2、环境设置为如下图

3、设置3个连杆,此处连杆1为大基座且为 固定连杆;连杆2为方块;连杆3为直线。三者均不用设置质量等

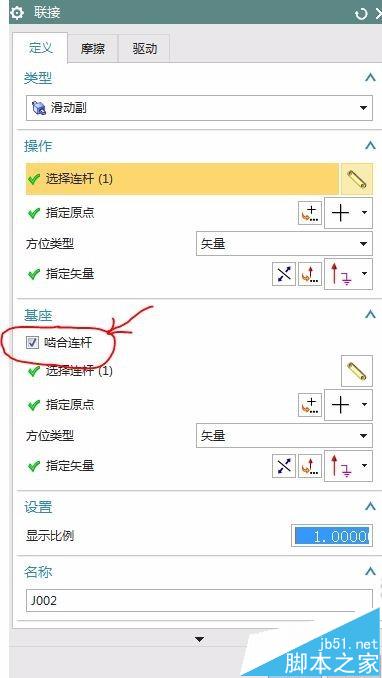
4、运动副J001在创建基座为固定连杆后就会自动生成无需设置。设置运动副J002为滑动副,操作连杆为方块,基座勾选啮合连杆为直线,二者原点和矢量方向一致。然后设置驱动,此处驱动设置为step函数(根据本运动仿真)


相关推荐
-

ug12.0滚轮放大缩小设置(ug10.0如何设置鼠标滚动方向)
我们在使用UG软件中,经常需要通过鼠标中键滚轮向前推或向后拉,来对图形进行放大和缩小显示的操作,由于每个人的使用习惯不同,有人喜欢向前推滚轮来放大图形,也有人喜欢向前推滚轮缩小图形.在UG10.0之前 ...
-
UG10.0怎么建模球刀? UG创建球刀的两种方法
UG10.0自中想要创建球刀,该怎么创建呢?下面我们就来看看详细的教程. 方法一: 1.打开UG模型,在“应用模块”中选择“加工”,进入UG加工环境中. 2.选择“创建刀具”,弹出对话框选择端铣刀,命 ...
-
UG10.0修剪体命令怎么使用?
今天我们就来介绍UG10.0修剪体命令的使用方法,下图中的左边实体没有修剪的内部抽壳实体,下图中的右边实体是从中间修剪开的实体,这两幅图对比更明显,下面我们就来看看详细的教程. 1.打开UG10.0软 ...
-
UG10.0中的修剪体命令如何去使用?
UG10.0中针对实体的编辑命令还是挺多的,上一篇笔者分享的是拆分体和删除体的组合使用,这一篇笔者分享一下修剪体命令的简单使用. 下图中的左边实体没有修剪的内部抽壳实体,下图中的右边实体是从中间修剪开 ...
-
UG10.0中如何插入图片?
UG10.0中如何插入图片,你们会吗?不会的想学吗?想学的往下看啊. 操作方法 01 打开UG10.0软件,新建一个模型文件,我想这里应该不用我在多说了吧? 02 如下图所示,按顺序操作:[菜单][插 ...
-
UG10.0模型怎么开四方孔? UG10.0四方孔的制作方法
开孔一般为圆形,那么在平面上开四方形的孔怎么做呢?来看下吧. 1.想要在如图所示圆盘的中心开一个26X26的方孔,怎么做?方法有好多种:本次用草图的方式进行方孔的定位,用布尔求差得到方孔,具体步骤如下 ...
-
UG10.0草图大师该怎么使用轮廓线命令的三种技巧?
在UG NX10.0草图中,利用轮廓线命令,可以一次绘制出草图的轮廓形状.这里为大家介绍一下这一命令的基本使用方法,并为大家介绍几个小技巧. 1.首先打开UG,进入草图 2.点击“插入”-“曲线”-“ ...
-
UG草图阵列怎么用?如何用UG10.0对曲线进行阵列
UG草图中阵列功能,其作用是用来复制相同特征的图元,UG草图中的阵列选项只能对曲线进行阵列.其主要的阵列方式有环形阵列和线性阵列(UG7.5以下的版本没有UG草图阵列功能). 以下为我使用UG10.0 ...
-
UG10.0进入草图环境方法
UG10.0有不同的方法进入草图环境,下面为大家介绍两种,分别是直接草图与任务环境中的草图 方法1 01 首先打开UG NX10.0,新建模型,进入建模环境 02 单击菜单上的"插入&quo ...
